

Pamięci FRAM w zastosowaniach praktycznych. Pamięć szeregowa FM24C64
Pamięci są dzielone na dwie kategorie. Pierwszą z nich są pamięci nieulotne. Od wielu lat są one używane w aplikacjach w celu zapamiętania pewnych stałych, niezmiennych informacji. Może to być program realizowany przez mikroprocesor czy też dla przykładu wzorce znaków wyświetlanych na ekranie wyświetlacza LCD. Podstawową cechą tego rodzaju pamięci jest stałość przechowywanych informacji również wtedy, gdy brak jest napięcia zasilania. Zazwyczaj zapis pamięci stałej (często zwany jej programowaniem), nawet mimo użycia technologii EEPROM czy też FLASH EEPROM, jest dość trudny i zajmuje dużo czasu, jeśli odnieść to do czasu odczytu tej pamięci. Druga grupa to pamięci ulotne, tzw. RAM. Są one łatwe do zapisu i pracują bardzo szybko, więc służą do przechowywania danych, które często ulegają zmianie. Inaczej niż w pamięciach nieulotnych, dane przechowywane w RAM giną po odłączeniu napięcia zasilającego i jeśli konieczne jest z jakiś względów zachowanie niezmiennego stanu RAM, to jest wymagane stosowania pomocniczych źródeł zasilania. Jest to swego rodzaju wyzwanie dla konstruktora układu. Wad wyżej opisanych układów nie ma nowy rodzaj pamięci, której technologia wytwarzania przed kilkunastu laty opuściła laboratoria naukowe. Jest to pamięć FRAM. Skrót nazwy tłumaczy się jako Ferroelectric Random Access Memory. Oznacza on technologię wytwarzania (uwaga!) nieulotnej pamięci RAM, czyli pamięci łączącej w sobie szybkość pracy RAM i trwałość ROM.
Pamięci wytwarzane w technologii FRAM były dostępne już przed kilkunastoma latami (praktycznie od 1993 roku), ale zarówno cena jak i dostępny asortyment nie zachęcały do ich stosowania. W ostatnim czasie technologia ta przeżywa prawdziwą eksplozję rozwoju. Firmy oferują liczne układy peryferyjne wyposażone w pamięci FRAM, a cena tych układów gwałtownie spada. Moim zdaniem w przyszłości technologia ta może zastąpić popularną technologię FLASH EEPROM chyba, że zostanie opracowany jakiś zupełnie nowy rodzaj pamięci.
Czym są pamięci FRAM?
FRAM jest rodzajem pamięci RAM, w której wykorzystano efekt ferroelektryczny do zapamiętywania bitów słowa danych. Efekt ten, być może znany niektórym studentom politechnik z ćwiczeń w laboratorium fizyki, występuje w niektórych materiałach krystalicznych i jest zdolnością materiału do przechowywania polaryzacji elektrycznej również w przypadku nieobecności pola elektrycznego, które tę polaryzację wywołało. Komórka pamięci tworzona jest poprzez nałożenie materiału ferroelektrycznego w postaci krystalicznej pomiędzy dwa doprowadzenia płaskich elektrod w taki sposób, aby został utworzony kondensator z materiałem ferroelektrycznym jako dielektrykiem. Konstrukcja tego kondensatora zbliżona jest do typowej konstrukcji komórki pamięci DRAM z tym, że zamiast przechowywać informację w postaci naładowanego kondensatora (tak, jak w typowo robi to komórka pamięci DRAM), bit przechowywany jest w postaci polaryzacji ładunków w obrębie struktury krystalicznej. W ten sposób – poprzez zmianę polaryzacji ładunków przy pomocy pola elektrycznego wewnątrz kondensatora, można tworzyć i zapamiętać dwa stabilne stany. Stany te umownie mogą odpowiadać wartościom logicznym bitów, to jest „zeru” i „jedynce”.
Prosta zasada działania, niemalże identyczna z tą stosowaną w pamięciach RAM, umożliwia konstrukcję prostych obwodów zapisu i odczytu komórek pamięci. Jak wspomniano wcześniej, materiał ferroelektryczny zachowuje polaryzację ładunków pomimo zaniku pola elektrycznego i w związku tym, nie tak jak w pamięciach RAM, dane mogą być przechowywane w sposób nieulotny. Zbudowana z jego wykorzystaniem komórka pamięci nie wymaga również okresowego odświeżania.
Pamięć FRAM jest odporna na działania zewnętrznego pola magnetycznego. Jej zasada działania, nie ma nic wspólnego z ferromagnetyzmem. Podobny jest jedynie opis zjawiska fizycznego: w przypadku materiałów ferroelektrycznych polaryzacji ulegają ładunki, natomiast w przypadku materiałów ferromagnetycznych – domeny magnetyczne.
Zasada działania pamięci FRAM
Na rysunku 1 przedstawiony jest poglądowy model kryształu ferroelektrycznego o strukturze perowskitu. Kryształ posiada ruchomy atom w środku swojej struktury (oznaczony kolorem żółtym). Przyłożenie pola elektrycznego powoduje, że „mobilny” atom przesuwa się w kierunku działania sił pola. Odwrócenie polaryzacji pola powoduje przemieszczanie się atomu w kierunku przeciwnym. Pozycje atomy na „górze” i „dole” struktury krystalicznej są stabilne. Atom pozostaje w jednej z nich w przypadku braku pola elektrycznego. Jako komórka pamięci cyfrowej, taka struktura jest wręcz idealna: posiada dwa stany stabilne, potrzebuje bardzo małej mocy do zmiany stanu i zachowuje ten stan nawet mimo działania różnych czynników zewnętrznych.
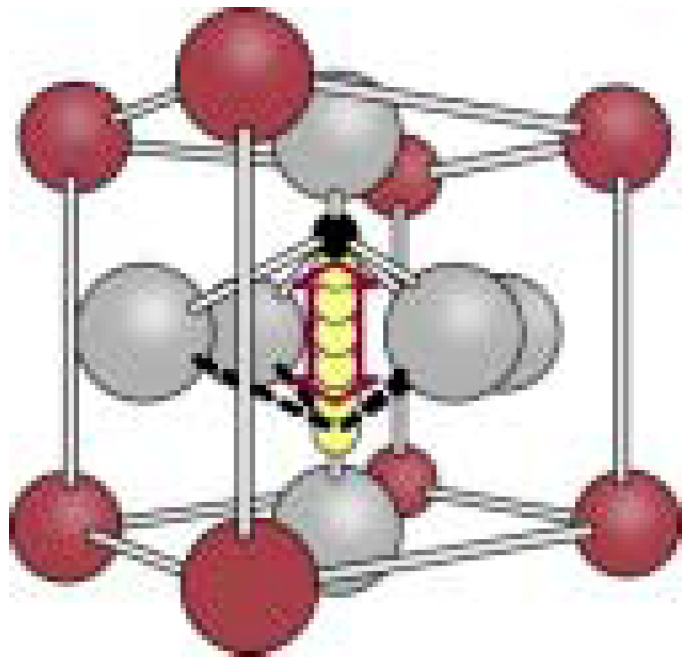
Rysunek 1. Budowa kryształu ferro-elektrycznego - perowskitu.
Odczyt. Mimo iż podstawowym elementem komórki pamięci jest kondensator, to jednak bity nie są zapamiętywane jako ładunek liniowy. Odczyt takiej komórki pamięci wymaga detekcji położenia atomu wewnątrz struktury krystalicznej. Niestety nie może ono być rozpoznane bezpośrednio i musi tu być używany pewien „zabieg”.
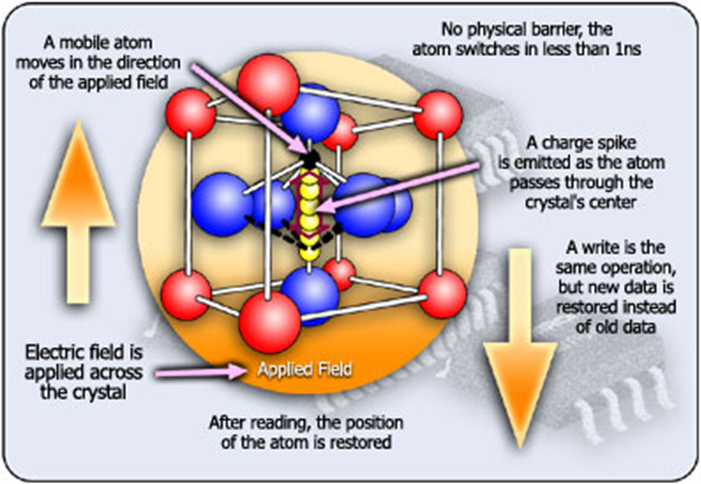
Do kondensatora przykładane jest napięcie. Na skutek tego pomiędzy jego okładzinami pojawia się pole elektryczne. Ruchomy atom przesuwa się zgodnie z kierunkiem działania pola, lub pozostaje w spoczynku, jeśli jego położenie jest z nim zgodne. W środku struktury kryształu występuje stan równowagi, który utrzymuje pozostałe atomy w ściśle określonych położeniach sieci krystalicznej a wypadowe pole elektryczne jest równe 0. Jeśli ruchomy atom przemieszcza się, to powoduje zaburzenie, co skutkuje impulsem energetycznym. Impuls ten dodaje się do ładunku zgromadzonego przez kondensator (pamiętajmy, że opisywane są struktury o rozmiarach kilkunastu atomów!). Na skutek tego jedne kondensatory naładowane będą do wartości ładunku wymuszonej przez pole elektryczne a inne będą posiadać ładunek będący kombinacją oddziaływania pola elektrycznego i ruchu atomu. Mimo, iż odczyt pamięci wymaga przemieszczenia atomu, to jednak należy pamiętać o tym, że atom przebywa bardzo krótką drogę. Jego położenie zmienia się w czasie 1 nanosekundy (10-9 sekundy) a cała operacja odczytu zajmuje około 70 nanosekund.
Łatwo na podstawie powyższego opisu wywnioskować, jak będzie wyglądać obwód określający stan bitu: będzie to rodzaj komparatora porównującego ładunek odebrany z komórki pamięci z pewnym poziomem odniesienia. Dobrze, a co ze zmianą polaryzacji ładunku? Przecież pisałem, że podczas odczytu atom przemieszcza się wewnątrz struktury. W związku z przyjętą metodą odczytu, każdemu cyklowi dostępu do pamięci towarzyszy rodzaj operacji odświeżania. A co w związku z tym z czasem dostępu do pamięci? Czy nie jest przez to odświeżanie wydłużany? Niestety tak. Wpływ odświeżania na czas odczytu pamięci FRAM jest znaczny, ponieważ zajmuje ono aż 50 nanosekund.
Zapis. Operacja zapisu jest bardzo podobna do opisywanego wcześniej odczytu. Inaczej niż inne rodzaje pamięci stałych programowane elektrycznie, nie wymaga przyłożenia wysokiego napięcia czy też długiego czasu zapisu. Wewnętrzny obwód przykłada napięcie do okładzin kondensatora ferroelektrycznego. Powoduje to odpowiednie przemieszczenie ruchomego atomu i polaryzację kryształów. Jeśli jest to potrzebne, nowe dane po prostu zmieniają stan polaryzacji kryształu ferroelektrycznego. Tak, jak w przypadku odczytu, zmiana stanu kryształu zajmuje ok. 1 nanosekundy podczas, gdy cała operacja zapisu około 70 nanosekund (7 x 10-8s!). Nieporównywalnie krótki czas, jeśli odnieść go np. do pamięci FLASH.
 |
 |
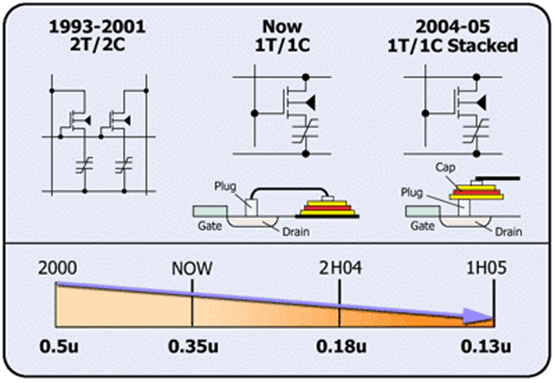 |
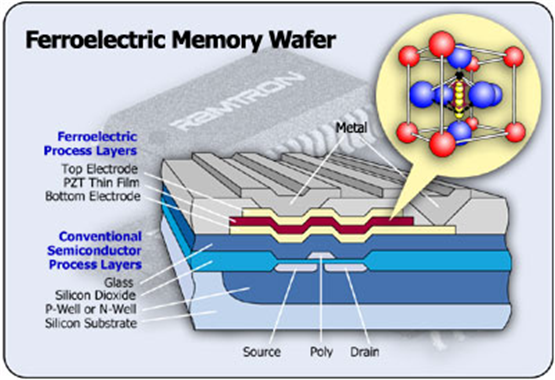
| Rysunki zaczerpnięte z materiałów firmy Ramtron. Od lewej: zasada działania odczytu i zapisu pamięci FRAM, budowa struktury układu pamięci FRAM, rozwój technologii wytwarzania pamięci FRAM. | ||
Główne zalety stosowania pamięci FRAM:
Cykl zapisu i cykl odczytu zajmują tyle samo czasu.
Można przeprowadzić ogromną ilość operacji zapisu i odczytu, ponieważ pamięć praktycznie nie zużywa się (gwarantowane jest 109 cykli zapisu!).
Do zasilania wymagana jest bardzo mała moc. Odczyt i zapis pamięci wymaga jej dokładnie tak samo mało.
W związku z brakiem dodatkowych napięć zasilających i konieczności stosowania dodatkowego źródła zasilania pamięci RAM w celu podtrzymania zawartości pamięci, aplikacja ulega znacznemu uproszczeniu.
Aplikacje
Oczywiście, w praktyce, wszystkie opisywane wyżej zjawiska nie będą obchodzić potencjalnego użytkownika układu. Producenci wyposażając układ peryferyjny w interfejs SPI zwalniają konstruktora od pamiętania o fizycznych cechach pamięci. Nieco inaczej jest w przypadku pamięci równoległych – poruszę ten temat w dalszej części artykułu.
Kiedy po raz pierwszy przeczytałem o upowszechnieniu się technologii pamięci FRAM, przed oczyma od razu miałem szerokie spektrum aplikacji. Po pierwsze, ze względu na bardzo dużą szybkość oraz ogromną liczbę cykli zapisu, bardzo zasadne jest użycie tego rodzaju pamięci jako pamięci masowej w komputerach PC, telefonach komórkowych, aparatach fotograficznych i innych urządzeniach elektronicznych. Moim zdaniem pamięci tego rodzaju mogą z powodzeniem zastąpić pamięć FLASH w mikrokontrolerach tworząc wspólny obszar pamięci dla danych oraz programu. Rzec by można, że im mniejszy będzie kod programu użytkownika, tym więcej pamięci RAM będzie miało do dyspozycji CPU mikrokontrolera. To nie wszystko: programy będą mogły dynamicznie modyfikować swój stan podczas pracy mikroprocesora. Moim zdaniem zupełnie zmieni to podejście do programowania oraz sposób tworzenia aplikacji. To jest przyszłość. Niestety istnieją jeszcze pewne ograniczenie technologiczne i póki co pamięci FRAM dzielą się na dwie podstawowe kategorie.
Pierwsza to typowe aplikacje do przechowywania danych. W nich pamięci FRAM służą do zapamiętywania danych przechowywanych poza systemem. Drugi rodzaj aplikacji jest związany z konstrukcją i opracowywaniem urządzeń związanych z mikrokontrolerami i mikroprocesorami. Dzięki bardzo dużej szybkości zapisu, pamięci te mogą być wielokrotnie błyskawicznie zapisywane, znacznie skracając czas potrzebny na testowanie aplikacji podczas jej uruchamiania. Innym aspektem jest programowanie w czasie produkcji – znaczne skrócenie czasu zapisu programu obniża koszty wytwarzania urządzenia. Nie jest również konieczne wyposażanie linii produkcyjnej w specjalne układy programatorów.
Produkty firmy RAMTRON
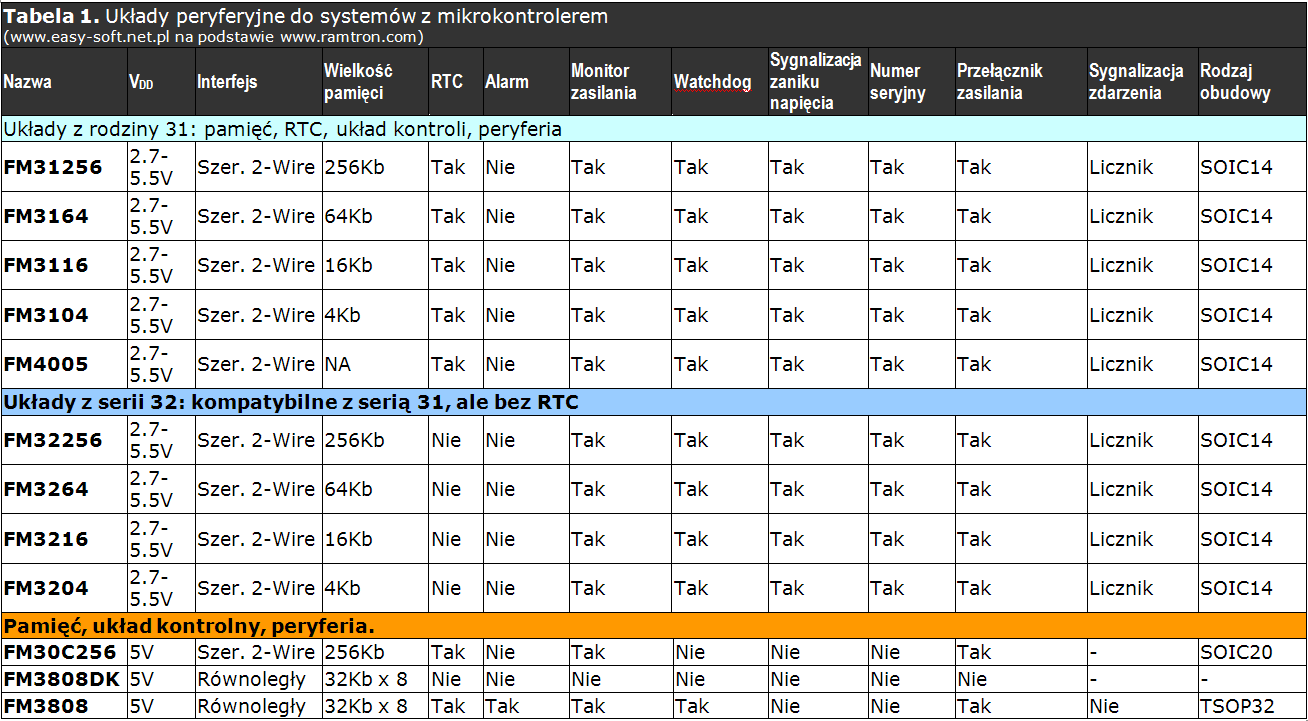
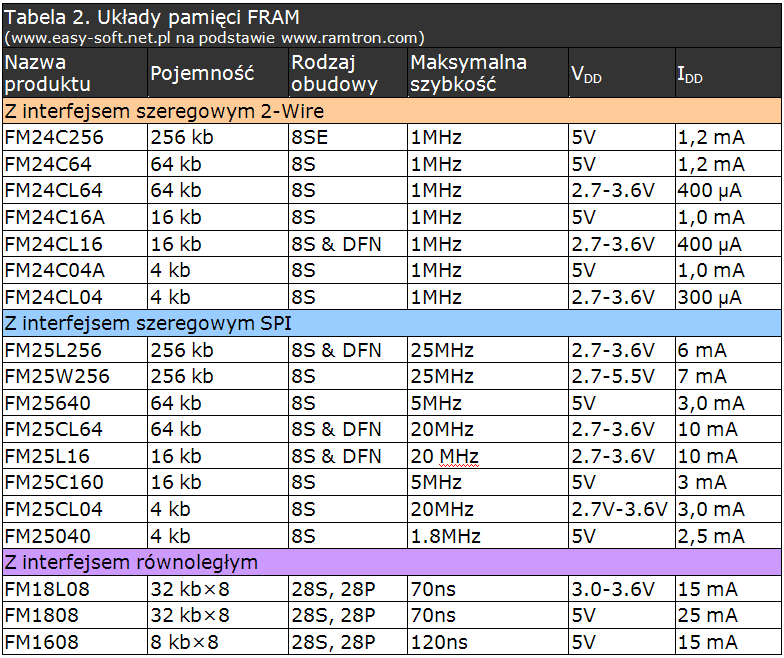
Firmą wiodącą na rynku produktów FRAM i praktycznie założoną tylko w celu ich rozwoju oraz rozpowszechniania jest Ramtron International Corporation z siedzibą w Colorado Springs (USA). Firma założona została w 1984 roku i po blisko 10 latach prac badawczych, w 1993 roku wprowadziła na rynek pierwszy produkt komercyjny. Była to pamięć o pojemności 4 kb (kilo - bit). Współcześnie firma jest liderem w dziedzinie technologii wytwarzania pamięci FRAM, właścicielem wielu patentów z tej dziedziny i oferuje szereg różnych układów peryferyjnych. Między innymi układy zawierające np. zegar czasu rzeczywistego oraz 256 kb pamięci FRAM. Krótkie zestawienie jej produktów zamieszczono w tabelach 1 i 2.
Czas przejść do pokazania praktycznych zastosowań FRAM. Ten rodzaj pamięci mimo dostępności układów oraz niewątpliwych ich zalet, nie jest jeszcze w naszym kraju zbyt popularny. Wiele z układów FRAM umożliwia zastąpienie wprost pamięci EEPROM, inne wymagają specjalnych aplikacji a jeszcze inne są całkowicie unikatowe. Proponuję aby na początek zająć się typową pamięcią szeregową z interfejsem 2-Wire (kompatybilny z I2C) o pojemności 64 kbit.
Pamięć szeregowa FM24C64 (64 kbit)
Wykonana w technologii FRAM pamięć FM24C64 wyposażona jest w szybki interfejs 2-Wire. Jest ona funkcjonalnym odpowiednikiem popularnej pamięci EEPROM produkowanej przez wiele firm pod oznaczeniem 24C64 (np. przez firmę Atmel Corp. AT24C64). Jako, że ten rodzaj pamięci jest dobrze znany elektronikom, tu w skrócie zostaną wymienione cechy pamięci po to, aby zająć się praktyczną realizacją interfejsu programowego umożliwiającego zapis i odczyt danych:
- niski pobór prądu: 150 μA przy zasilaniu 5V, 10 μA w trybie standby.
- organizacja: 8192 x 8 bit.
- możliwość wykonania aż 1012 cykli zapisu / odczytu!
- gwarancja na utrzymanie zawartości przez 10 lat.
- brak czasu oczekiwania na zapis/odczyt bajtu (czas dostępu znacznie krótszy od okresu zegara transmisji interfejsu).
- częstotliwość sygnału zegarowego interfejsu do 1MHz.
- kompatybilna z pamięciami EEPROM typu 24C64.
- interfejs zbliżony funkcjonalnie do I2C (tryby: standardowy 100 kHz i szybki 400 kHz).
Jak wspomniano przy okazji krótkiej charakterystyki pamięci, jest ona kompatybilna z popularną pamięcią EEPROM 24C64. Podobnie jest z programem obsługi: nie wymaga on żadnych specjalnych zabiegów. Najważniejsza jest różnica funkcjonalna: pamięć FRAM w porównaniu z EEPROM wyróżnia się ogromną wręcz szybkością zapisu. W związku z tym, że interfejs I2C jest znany z szeregu aplikacji, opis pamięci ograniczę do krótkiej charakterystyki funkcjonalnej.
Podobnie jak I2C, kompatybilny z nim interfejs 2-Wire wymaga rezystorów zasilających (pull-up) o wartości minimalnej około 1,8kΩ. Wartość rezystorów zależy od pojemności połączeń. Przy bardzo krótkich połączeniach wystarczające mogą być rezystory wbudowane w strukturę np. mikrokontrolera, ale nie polecam rozwiązania tego typu. Linie interfejsu są dwukierunkowe, transmisja zawsze nadzorowana jest przez układ zarządzający (master), podczas gdy pamięć jest zawsze układem nadzorowanym (slave). Podobnie jak w I2C linie noszą nazwę SDA (danych) i SCL (zegarowa). Od I2C przejęto również sygnalizację stanów (potwierdzenie odbioru danych czy komendy - ACK) oraz polecenia START, STOP.
Po otrzymaniu polecenia START interfejs pamięci oczekuje na 7-bitowy adres oraz bit kierunku transmisji (zapis / odczyt). W 8-bitowym słowie adresu, bity 7 do 4 identyfikują rodzaj układu i są predefiniowane przez producenta. Bity 3 do 1 mogą być ustawiane przez użytkownika poprzez zwieranie odpowiednich wyprowadzeń do potencjałów „1” lub „0”. Najmłodszy bit 0 określa kierunek transmisji (0 – zapis, 1 – odczyt).
Na listingu 1 umieściłem funkcje obsługi zapisu i odczytu danych. Program w asemblerze 8051 napisany został na podstawie noty aplikacyjnej firmy Atmel przeznaczonej dla pamięci AT24C64 (dla EEPROM). Jak wspomniałem wcześniej, oprócz bardzo dużej szybkości działania, pamięć FRAM nie różni się niczym w obsłudze od swojego odpowiednika EEPROM. Przykładowy program zapisuje dane do pamięci FRAM, odczytuje i weryfikuje odczytaną zawartość. W przypadku niezgodności linia ERROROUT (w przykładzie jest to P1.4) przyjmuje stan wysoki. Program źródłowy zawiera dużo komentarzy i nie jest zbyt trudny do analizy. Wymagana jest jedynie elementarna znajomość asemblera mikrokontrolera 8051.
Jacek Bogusz
j.bogusz@easy-soft,net.pl
Listing 1. Funkcje zapisu i odczytu pamięci 24C64
;------------------------------------------
;Funkcje obsługi pamięci 24C64
;------------------------------------------
;Dla mikrokontrolera z rodziny Intel 8051
;pracującego z zegarem 12MHz
$INCLUDE (REG_51.PDF) ;dołączenie definicji rejestrów uK (kompilator RA-51 Raisonance)
NAME OBSLUGA_AT24C64
FIXEDADDR EQU 0A0H ;stała część adresu pamięci 24C64
USRADDR EQU 0 ;ustawiana przez użytkownika część adresu (wartości 0..7)
MEMSIZE EQU 2000H ;liczba bajtów dla 24C64
PMEMSIZE EQU 32 ;liczba bajtów na stronę pamięci dla 24C64
FILL EQU 0AAH ;wartość używana w funkcji FILL do wypełnienia pamięci
;Definicje funkcji rejestrów
index EQU R0 ;wskaźnik bufora w pamięci RAM mikrokontrolera
count EQU R1 ;licznik bajtów
zdata EQU R2 ;rejestr bajtu danych
addr_lo EQU R3 ;młodszy bajt adresu bajtu w pamięci 24C64
addr_hi EQU R4 ;starszy bajt - / / - - / / -
;Definicje linii interfejsu
SCL BIT P1.2 ;linia zegara (SCL)
SDA BIT P1.3 ;linia danych (SDA)
ERROROUTBIT P1.4 ;sygnalizacja błędu weryfikacji
;zmienne w pamięci RAM
DSEG AT 20H
buffer: DS PMEMSIZE ;bufor do zapisu / odczytu danych
DSEG AT 60H ;początek stosu
stack: DS 20H ;rozmiar stosu
;tablica wektorów przerwań
CSEG
CODE AT 0000H ;wektor przerwania po RESET
ajmp on_reset
CODE AT 0003H ;zewnętrzne przerwanie INT0
reti
CODE AT 000BH ;przerwanie TF0
reti
CODE AT 0013H ;zewnętrzne przerwanie INT1
reti
CODE AT 001BH ;przerwanie TF1
reti
CODE AT 0023H ;przerwanie od UART
reti
USING 0 ;używany będzie bank rejestrów numer 0
CODE AT 0080H ;początek programu głównego
on_reset:
mov SP,#(stack-1) ;inicjalizacja wskaźnika stosu
setb SDA ;inicjalizacji linii interfejsu
setb SCL ;SDA = SCL = 1
clr ERROROUT ;ustawienie stanu niskiego wyjścia sygn.błędu
;< przykłady użycia funkcji >
call byte_fill ;wypełnienie pamięci wartością FILL (0AAH)
jc fault ;jeśli ustawiona flaga C, to błąd
call verify_byte_fill ;weryfikacja zawartości
jc fault
call page_fill ;wypełnienie strony pamięci wartością FILL
jc fault ;jeśli ustawiona flaga C, to błąd
call verify_page_fill ;weryfikacja zawartości
jc fault
jmp $
fault:
setb ERROROUT ;sygnalizacja błędu
jmp $ ;pętla nieskończona
;wypełnienie pamięci wartością zadeklarowaną jako FILL
;tryb stronnicowania nie jest wykorzystywany, zapisywany
;jest bajt po bajcie; ustawienie flagi CY wskazuje na przekroczenie
;limitu czasu operacji
;modyfikuje wartości A, B, DPTR, ADDR_HI (R2), ADDR_LO (R3), bit C
byte_fill:
mov zdata,#FILL
mov dptr,#0 ;adres początkowy dla operacji zapisu
bf_x1:
mov addr_lo,DPL ;ustawienie adresu bajtu w pamięci 24C64
mov addr_hi,DPH
mov B,#120 ;licznik powtórzeń
bf_x2:
mov A,#USRADDR ;do akumulatora zapisywana jest zmienna część adresu
call write_byte ;próba zapisu
jnc bf_x3 ;skok, jeśli zapis pomyślny
djnz B,bf_x2 ;błąd, ponowna próba zapisu
setb C ;zapis nie powiódł się, sygnalizacja błędu
jmp bf_x4 ;i wyjście
bf_x3:
inc dptr ;następna pozycja w pamięci 24C64
mov A,DPL ;sprawdzenie młodszego bajtu (limitu) dla adresów
cjne A,#(LOW MEMSIZE),bf_x1 ;powtórnie, jeśli to nie ostatni bajt
mov A,DPH ;sprawdzenie starszego bajtu adresu
cjne A,#(HIGH MEMSIZE),bf_x1 ;powtórnie, jeśli to nie ostatni bajt
clr C ;zerowanie flagi sygnalizacji błędu
bf_x4:
ret ;koniec, pomyślna realizacja funkcji
;weryfikacja bajtów zapisanych w pamięci; odczytuje i sprawdza jeden
;bajt w danym momencie; używana jest funkcja Random Read do sprawdzenia
;zawartości pod pierwszym adresem oraz inicjalizacji wewnętrznego licznika
;adresów; następnie wywoływana jest Current Address Read i sprawdzana krok
;po kroku zawartość pamięci
;modyfikuje wartości A, B, DPTR, ADDR_HI (R2), ADDR_LO (R3), bit C
verify_byte_fill:
mov DPTR,#0 ;inicjalizacja rejestru adresów
mov addr_lo,DPL ;zapamiętanie adresów
mov addr_hi,DPH
mov B,#120 ;liczba powtórzeń
vbf_x1:
mov A,#USRADDR ;załadowanie zmiennej części adresu
call read_random ;próba odczytu
jnc vbf_x2 ;skok, jeśli pomyślna
djnz B,vbf_x1 ;błąd, powtórna próba odczytu
jmp vbf_x6 ;przekroczono limit, wyjście z ustawioną flagą CY
vbf_x2:
cjne A,#FILL,vbf_x6 ;skok, jeśli błąd porównania
jmp vbf_x5 ;następny adres w pamięci
vbf_x3:
mov A, #USRADDR
call read_current ;wywołanie funkcji odczytu bieżącego bajtu
jc vbf_x6 ;skok, jeśli operacja nie powiodła się
cjne A,#FILL,vbf_x6 ;skok, jeśli błąd porównania
vbf_x5:
inc dptr ;następny adres w pamięci
mov A,DPL ;sprawdzenie młodszego bajtu (limitu) dla adresów
cjne A,#(LOW MEMSIZE),vbf_x3 ;powtórnie, jeśli to nie ostatni bajt
mov A,DPH ;sprawdzenie starszego bajtu dla adresów
cjne A,#(HIGH MEMSIZE),vbf_x3 ;powtórnie, jeśli to nie ostatni bajt
clr C ;zerowanie flagi sygnalizacji błędu
ret ;wyjście
vbf_x6:
setb C ;ustawienie flagi sygnalizacji błędu
ret
;wypełnienie strony w pamięci wartością FILL
;modyfikuje wartości A, B, DPTR, ADDR_HI (R2), ADDR_LO (R3), bit C
page_fill:
mov B,#PMEMSIZE ;do B liczba bajtów na stronę
mov index,#buffer ;"index" jako wskaźnik do bufora w RAM mikrokontrolera
pf_x1:
mov @index,#FILL ;wypełnienie bufora w RAM wartością FILL
inc index
djnz B,pf_x1
;zapis bufora do pamięci 24C64 - jedna strona
mov dptr,#0 ;inicjalizacji wskaźnika adresów
pf_x2:
mov addr_lo,DPL ;nastawy rejestru adresów
mov addr_hi,DPH
mov count,#PMEMSIZE ;liczba bajtów na stronę
mov B,#120 ;rejestr B jako licznik powtórzeń
pf_x3:
mov A,#USRADDR ;załadowanie programowanej części adresu
call write_block ;próba zapisu
jnc pf_x4 ;skok, jeśli próba pomyślna
djnz B,pf_x3 ;ponowna próba zapisu
setb C ;ustawienie flagi sygnalizacji błędu
jmp pf_x6 ;i wyjście
pf_x4:
;dodanie rozmiaru PMEMSIZE do wskaźnika adresów
mov A,DPL ;dodawanie 2 bajtów (młodszy, później starszy)
add A,#PMEMSIZE
mov DPL,A
jnc pf_x5
inc DPH ;rozkaz INC DPH zastępuje dodanie do DPH przeniesienia
pf_x5:
cjne A,#(LOW MEMSIZE),pf_x2 ;jak poprzednio-sprawdzenie adresu
mov A,DPH
cjne A,#(HIGH MEMSIZE),pf_x2
clr C
pf_x6:
ret
;weryfikacja strony zapisanej w pamięci 24C64
;weryfikowana jest jedna strona w danym momencie
;modyfikuje wartości A, B, DPTR, ADDR_HI (R2), ADDR_LO (R3), bit C
verify_page_fill:
;przepisanie strony z pamięci 24C64 do bufora
mov DPTR,#0 ;inicjalizacja licznika adresów
vpf_x1:
mov addr_lo,DPL
mov addr_hi,DPH
mov count,#PMEMSIZE ;liczba bajtów na stronę
mov B,#120 ;licznik powtórzeń
vpf_x2:
mov A,#USRADDR ;zapamiętanie zmiennej części adresu
call read_block ;próba odczytu
jnc vpf_x4 ;skok, jeśli pomyślna
djnz B,vpf_x2 ;ponowna próba odczytu
vpf_x3:
setb C ;ustawienie bitu sygnalizacji błędu
jmp vpf_x7 ;wyjście
vpf_x4:
;weryfikacja zawartości bufora
mov B,#PMEMSIZE ;liczba bajtów na stronę
mov index,#buffer ;zapamiętanie adresu bufora w RAM
vpf_x5:
cjne @index,#FILL,vpf_x3 ;skok, jeśli błąd porównania
inc index ;następna pozycja w buforze
djnz B,vpf_x5
;dodanie PMEMSIZE do wskaźnika adresu
mov A,DPL ;operacja przeprowadzana jak wyżej
add A,#PMEMSIZE
mov DPL,A
jnc vpf_x6
inc DPH
vpf_x6:
cjne A,#(LOW MEMSIZE),vpf_x1
mov A,DPH
cjne A,#(HIGH MEMSIZE),vpf_x1
clr C
vpf_x7:
ret
;zapis na stronie pamięci zawartości bufora BUFFER ;wywołanie:
;adres 1-go bajtu w ADDR_HI:ADDR_LO, dane do zapisu w BUFFER,
;liczba bajtów w COUNT, zmienna część adresu układu w A
;zwraca CY=1, jeśli magistrala jest zajęta lub pamięć nie odpowiada
;modyfikuje: A, COUNT, INDEX
write_block:
call start ;wysłanie polecenie I2C START
jc wb_x8 ;przerwa, jeśli magistrala jest zajęta
rl A ;zmienna część adresu przesuwana jest na poz. bitów 3:1
orl A,#FIXEDADDR ;dodanie stałej części adresu
clr ACC.0 ;zerowanie bitu numer 0: zapis danych
call shout ;wysłanie adresu pamięci
jc wb_x7 ;jeśli układ nie odpowiada, to błąd i wyjście
mov A,addr_hi ;wysłanie starszego bajtu adresu słowa w pamięci
call shout
jc wb_x7 ;jeśli układ nie odpowiada, to błąd i wyjście
mov A,addr_lo ;wysłanie młodszego bajtu adresu słowa w pamięci
call shout
jc wb_x7 ;jeśli układ nie odpowiada, to błąd i wyjście
mov index,#buffer ;załadowanie do zmiennej INDEX adresu bufora w RAM
wb_x6:
mov A,@index ;pobierz bajt
call shout ;wyślij do pamięci 24C64
jc wb_x7 ;jeśli układ nie odpowiada, to błąd i wyjście
inc index ;następna pozycja w buforze
djnz count,wb_x6 ;następny adres w 24C64
clr C ;zerowanie flagi C - sygnalizacji błędu
wb_x7:
call stop ;wysłanie polecenie I2C STOP
wb_x8:
ret
;odczyt jednego bajtu do jednej strony bajtów z pamięci 24C64
;wysyła polecenie Random Read a następnie Sequential Read
;wywołanie: adres 1-go bajtu w ADDR_HI:ADDR_LO, dane zwracane w BUFFER,
;liczba bajtów w COUNT, zmienna część adresu układu w A
;zwraca CY=1, jeśli magistrala jest zajęta lub pamięć nie odpowiada
;modyfikuje: A, COUNT, INDEX
read_block:
;tryb zapisu w celu ustawienia licznika adresów 24C64
call start ;wysłanie polecenia I2C START
jc rb_x5 ;przerwa, jeśli magistrala jest zajęta
rl A ;zmienna część adresu przesuwana jest na poz. bitów 3:1
orl A,#FIXEDADDR ;dodanie stałej części adresu
mov index,A ;zapamiętanie kopii adresu urządzenia
clr ACC.0 ;wybór operacji zapisu
call shout ;wysłanie adresu pamięci
jc rb_x4 ;wyjście, jeśli brak potwierdzenia
mov A,addr_hi ;wysłanie starszej części adresu słowa
call shout
jc rb_x4 ;wyjście, jeśli brak potwierdzenia
mov A,addr_lo ;wysłanie młodszej części adresu słowa
call shout
jc rb_x4 ;wyjście, jeśli brak potwierdzenia
;zmiana trybu na "odczyt" i odczyt bajtów
call start ;powtórne wysłanie polecenia I2C START
jc rb_x4 ;wyjście, jeśli brak potwierdzenia
mov A,index ;odtworzenie adresu pamięci
setb ACC.0 ;kasowanie bitu 0 adresu - odczyt
call shout ;wysłanie adresu na magistralę I2C
jc rb_x4 ;wyjście, jeśli brak potwierdzenia
mov index,#buffer ;do zmiennej INDEX wskazanie do bufora
rb_x1:
call shin ;odbiór bajtu od pamięci
mov @index,A ;zapamiętanie ich w RAM mikrokontrolera
cjne count,#1,rb_x2 ;skok, jeśli to nie ostatni bajt
call NAK ;nie wysyłaj potwierdzenia, ostatni bajt
jmp rb_x3 ;wyjście
rb_x2:
call ACK ;wyślij potwierdzenie
inc index ;następna pozycja w buforze
djnz count,rb_x1 ;następny bajt w pamięci 24C64
rb_x3:
clr C ;kasowanie flagi błędu
rb_x4:
call stop ;wysłanie rozkazu I2C STOP
rb_x5:
ret
;zapis bajtu do pamięci 24C64; wywołanie: adres 1-go bajtu w
;ADDR_HI:ADDR_LO, dane do zapisu w ZDATA, zmienna część adresu
;układu pamięci w A, zwraca CY=1, jeśli magistrala jest zajęta lub
;pamięć nie odpowiada, modyfikuje A
write_byte:
call start ;wysłanie rozkazu I2C START
jc wb_y9 ;wyjście, jeśli brak potwierdzenia
rl A ;zmienna część adresu przesuwana jest na poz. bitów 3:1
orl A,#FIXEDADDR ;dodanie stałej części adresu
clr ACC.0 ;operacja zapisu (b0=0)
call shout ;wysłanie adresu pamięci
jc wb_y8 ;wyjście, jeśli brak potwierdzenia
mov A,addr_hi ;wysłanie starszego bajtu adresu słowa
call shout
jc wb_y8 ;wyjście, jeśli brak potwierdzenia
mov A,addr_lo ;wysłanie młodszego bajtu adresu słowa
call shout
jc wb_y8 ;wyjście, jeśli brak potwierdzenia
mov A,zdata ;pobranie danych z ZDATA do ACC
call shout ;wysłanie danych do pamięci 24C64
jc wb_y8 ;wyjście, jeśli brak potwierdzenia
clr C ;kasowanie znacznika błędu
wb_y8:
call stop ;wysłanie rozkazu I2C STOP
wb_y9:
ret
;odczyt bajtu spod bieżącego adresu w pamięci 24C64
;wywoływana ze zmienną częścią adresu w A, zwraca bajt w A
;zwraca CY=1, jeśli magistrala jest zajęta lub pamięć nie
;odpowiada, modyfikuje A
read_current:
call start ;wysłanie rozkazu I2C START
jc rc_x5 ;wyjście, jeśli brak potwierdzenia
rl A ;zmienna część adresu przesuwana jest na poz. bitów 3:1
orl A,#FIXEDADDR ;dodanie stałej części adresu
setb ACC.0 ;operacja odczytu (b0=1)
call shout ;wysłanie adresu pamięci
jc rc_x4 ;wyjście, jeśli brak potwierdzenia
call shin ;odbiór bajtu danych
call NAK ;nie wysyłaj potwierdzenia, koniec operacji
clr C ;kasowanie flagi sygnalizacji błędu
rc_x4:
call stop ;wysłanie rozkazu I2C STOP
rc_x5:
ret
;wywyłanie funkcji Read Random (odczyt swobodny)
;wywoływana ze zmienną częścią adresu w A, adresem bajtu w
;ADDR_HI:ADDR_LO; bajt zwracany w akumulatorze
;zwraca CY=1, jeśli magistrala jest zajęta lub pamięć nie
;odpowiada
read_random:
push B ;zapamiętanie stanu rejestru B na stosie
mov B,A ;zapamiętanie kopii zmiennej części adresu
;tryb zapisu w celu ustawienia licznika adresów 24C64
call start ;wysłanie rozkazu I2C START
jc rr_x7 ;wyjście, jeśli brak potwierdzenia
rl A ;zmienna część adresu przesuwana jest na poz. bitów 3:1
orl A,#FIXEDADDR ;dodanie stałej części adresu
clr ACC.0 ;operacja zapisu (b0=0)
call shout ;wysłanie adresu pamięci
jc rr_x6 ;wyjście, jeśli brak potwierdzenia
mov A,addr_hi ;wysłanie starszego bajtu adresu słowa
call shout
jc rr_x6 ;wyjście, jeśli brak potwierdzenia
mov a,addr_lo ;wysłanie młodszego bajtu adresu słowa
call shout
jc rr_x6 ;wyjście, jeśli brak potwierdzenia
;wywołanie funkcji Call Current Address Read
mov A,B ;odtwórz zmienną część adresu
call read_current
jmp rr_x7 ;wyjście
rr_x6:
call stop ;wysłanie rozkazu I2C STOP
rr_x7:
pop B ;odtworzenie stanu rejestru B
ret
;wysłanie polecenie I2C START (SDA = "1" -> "0" przy SCL = "1")
;powrót z SCL = SDA = 0, zwraca CY = 1, jeśli magistrala jest zajęta
start:
setb SDA
setb SCL
;sprawdzenie zajętości magistrali I2C
jnb SDA,st_x0 ;skok, jeśli SDA <> "1"
jnb SCL,st_x0 ;skok, jeśli SCL <> "1"
nop ;czas na ustalenie się linii
clr SDA ;zmiana stanu SDA (SDA -> "0" przy SCL = "1")
nop ;opóźnienie
nop
nop
clr SCL ;zmiana stanu SCL (SCL -> "0" przy SDA = "0")
clr C ;kasowanie flagi sygnalizacji błędu
jmp st_x1
st_x0:
setb c ;ustawienie flagi sygnalizacji błędu
st_x1:
ret
;wysłanie rozkazu I2C STOP (SDA = "0" -> "1" przy SCL = "1")
;spodziewane jest SCL = "0", powrór z SDA = SCL = "1"
stop:
clr SDA
nop ;czas na ustalenie SDA
setb SCL ;SCL -> "1" przy SDA = "0"
nop ;czas na ustalenie
nop
nop
setb SDA ;zmiana SDA -> "1"
ret
;wyprowadzenie bajtu przez SDA w takt SCL (najbardziej znaczący
;bit wyprowadzany jest jako pierwszy); wywoływana z bajtem do
;wysłania w A, zwraca CY = 1, jeśli magistrala jest zajęta
shout:
push B ;zapamiętanie stanu rejestru B na stosie
mov B,#8 ;rejestr B jako licznik wysyłanych bitów
sho_x2:
rlc A ;przesunięcie bajtu w lewo i przeniesienie najstarszego
;bitu dla flagi C
mov SDA, c ;wyprowadzenie bitu
nop ;czas na ustalenie się wyjścia mikrokontrolera
setb SCL ;zmiana SCL ___|```
nop ;czas na ustalenie
clr SCL ;zmiana SCL ```|___
djnz B,sho_x2 ;następny bit
setb SDA ;ustawienie SDA = "1" dla odbioru ACK
nop ;czas na ustalenie się pamięci
setb SCL ;narastające zbocze SCL
nop ;czas na ustalenie
mov C,SDA ;odczyt bitu ACK
clr SCL ;zmiana SCL "1" -> "0"
pop B ;odtworzenie stanu rejestru B
ret
;odczyt 8 bitów, kompletacja słowa danych (z postaci szeregowej na równoległą)
;jako pierwszy wprowadzany jest najbardziej znaczący bit, bajt zwracany jest w A
shin:
setb SDA ;SDA jak wejście
push B ;zapamiętanie stanu rejestru B na stosie
mov B,#8 ;rejestr B jako licznik wysyłanych bitów
shi_x3:
nop ;czas na ustalenie się linii danych
setb SCL ;narastające zbocze SCL
nop
mov C,SDA ;odczyt linii danych
rlc A ;wprowadzenie bitu do akumulatora na najmłodszą pozycję
clr SCL ;opadające zbocze SCL
djnz B,shi_x3 ;następny bit
pop B ;odtworzenie stanu rejestru B
ret
;wysłanie potwierdzenia (stan niski linii SDA)
ACK:
clr SDA ;wysłanie ACK
nop ;czas na ustalenie
setb SCL ;narastające zbocze sygnału SCL
nop ;czas na ustalenie
clr SCL ;opadające zbocze SCL
ret
;wysłanie "nie-potwierdzenia"
NAK:
setb SDA ;ustawienie NAK
nop ;czas na ustalenie
setb SCL ;narastające zbocze sygnału SCL
nop ;czas na ustalenie
clr SCL ;opadające zbocze SCL
ret
END

| Załącznik | Wielkość |
|---|---|
| Źródło programu z artykułu (RASM-51) | 17.12 KB |


Dodaj nowy komentarz