25 listopad 2019
Na targach SPS firma iC-Haus zaprezentowała najnowszą generację układów scalonych do optycznych, refleksyjnych enkoderów absolutnych. Seria iC-PZ ustanawia nowe standardy w miniaturyzacji oraz elastyczności zastosowania. Średnica dysku oraz jego rozdzielczość optyczna są niemal dowolnie wybierane dzięki implementacji innowacyjnych funkcji FlexCount i FlexCode. czytaj dalej...
2 czerwuec 2019
Firma Allegro Micro dodała do oferty sensor ACS70310 mający największą szybkość i dokładność spośród dotąd oferowanych. Firma opracowała go z przeznaczeniem do urządzeń mierzących prąd o natężeniu powyżej 400 A w instalacjach samochodów hybrydowych i z napędem elektrycznym. Zakres temperatury pracy wynosi -40…_150°C. Niepewność pomiaru to ±1,2%, offset wynoszący ±5 mV w całym... czytaj dalej...
31 maj 2019
Coral Development Board to komputer jednopłytkowy z wymiennym systemem na module (SOM), który zawiera eMMC, SOC, radio bezprzewodowe i TPU Google Edge. Spełniający potrzeby inżynierów, projektantów i techników przemysłowych komputer może posłużyć do wykonania prototypów urządzeń, pełnić rolę komputera jednopłytkowego, lub zestawu ewaluacyjnego . czytaj dalej...
31 maj 2019
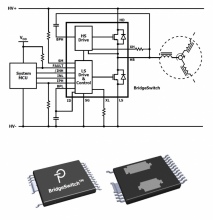
Półmostkowe sterowniki BridgeSwitch firmy Power Integrations ułatwiają projektowanie układów napędowych do 2- i 3-fazowych silników PM i BLDC o mocy do 300 W. czytaj dalej...
29 maj 2019
Firma Littelfuse powiększyła ofertę tyrystorów zabezpieczających SIDACtor o serię PxxxxS4xLRP. Zaprojektowano je specjalnie do ochrony kabli CVBS i portów wideo. Są one oferowane w obudowie SOD-123FL o wymiarach 3,7 mm×1,9 mm×1,0 mm. Ich napięcie robocze wynosi 6 V. Tyrystory są wytrzymują prąd udarowy do 100 A@5/310 us. czytaj dalej...
Naszym zdaniem
Wzmacniacz lampowy jest niespełnionym marzeniem wielu elektroników (i nie tylko ich). Samodzielne wykonanie takiego wzmacniacza nie jest bardzo trudne, ponieważ nie jest on specjalnie skomplikowany. Można też taki wzmacniacz zbudować „po staremu”, to znaczy wykonać metalowe chassis, przymocować do niego podstawki i transformatory, a następnie połączyć wszystko metodą na tzw. „pająka”. Jednak każdy mający nieco doświadczenia wie, że jeśli oczekujemy przyzwoitych parametrów przy zachowaniu estetyki wykonania, to sprawa nie jest aż tak trywialna. czytaj dalej...