

Flowcode. Zdalne sterowanie lustrzanką
Prezentujemy projekt wykonany z zastosowaniem pakietu Flowcode. Nieskomplikowane elektrycznie urządzenie jest dosłownie naszpikowane oprogramowaniem i wiedzą. Z jednej strony jest to pakiet Flowcode, dzięki któremu można dosłownie narysować sobie program, a z drugiej strony wiedza teoretyczna niezbędna do wykonania urządzenia działającego z różnymi aparatami fotograficznymi, różnych producentów, równie dobrze jak urządzenie firmowe.
W czasach, kiedy nie znane było pojęcie fotografii cyfrowej amatorzy często sami wykonywali obróbkę zdjęć we własnej ciemni. Wywoływanie, szczególnie błon i odbitek barwnych wymagało ścisłego zachowania temperatur chemikaliów i czasów poszczególnych etapów procesu. Dlatego popularne były elektroniczne programowane zegary ciemniowe pozwalające na precyzyjne odmierzenie tych czasów. Takie zegary były projektowane i wykonywane również przez elektroników hobbystów. Teraz, kiedy fotografia całkowicie cyfrowa. zdjęcia są zapisywane na karatach pamięci flash ( najczęściej SD), potem przesyłane do komputera, gdzie mogą być poddane obróbce w programach graficznych. Odbitki nie są wykonywane na papierze światłoczułym, tylko drukowane na kolorowych drukarkach. Zresztą coraz częściej albumy ze zdjęciami są tylko katalogami na dysku komputera, a odbitki na papierze wykonywane są coraz rzadziej.
Kiedy już wydawało się, że w tej dziedzinie nie pozostało nic do samodzielnego zrobienia przez elektronika, mój znajomy poprosił mnie o wykonanie pilota zdalnego sterowania do lustrzanki cyfrowej firmy Pentax. W pierwszym momencie zacząłem się zastanawiać po co zdalnie sterować aparatem cyfrowym? Okazało się, że powody są co najmniej dwa. Pierwszy, to wykonanie autoportretu. Stajemy przed aparatem , naciskamy przycisk pilota i robimy sobie zdjęcie. Drugi powód, to dążenie do perfekcyjnej ostrości wykonywanego zdjęcia. W momencie, kiedy wykonywane jest zdjęcie niezbędne jest aby aparat nie poruszał się. Dlatego najlepsze technicznie zdjęcia wykonywane są, kiedy jest on umocowany na statywie. Jednak aby wykonać zdjęcie, trzeba nacisnąć spust migawki, a to jest źródłem drgań aparatu. Aby ich uniknąć zwalnia się migawkę bezdotykowo za pomocą pilota zdalnego sterowania. Lustrzanki cyfrowe są wyposażone w możliwość takiego sterowania – mają odbiorniki podczerwieni i akceptują dedykowane komendy różniące się od komend systemów stosowanych w sprzęcie RTV.
Pierwszym problemem z jakim przyszło mi się zmierzyć w trakcie opracowywania koncepcji pilota było generowanie sygnału nośnej. Załóżmy, że nośna będzie miała częstotliwość 36 kHz. Okres takiego przebiegu to w przybliżeniu 28 µs. W czasie jednego okresu linia wyjściowa portu sterującego nadajnik musi mieć poziom niski przez 14 µs i wysoki przez 14 µs. Najprościej byłoby generować przebieg w przerwaniu zegara zgłaszanym co 14 µs.
Do sterowania chciałem wykorzystać mikrokontroler PIC16 taktowany częstotliwością 8 MHz. Cykl maszynowy trwa w nim 0,5 µs. Łatwo obliczyć, że pomiędzy kolejnymi przerwaniami mikrokontroler może wykonać 28 rozkazów. Jest to zdecydowanie za mało, aby móc obsłużyć przerwania i wykonywać jakieś czynności poza nimi. Można było zwiększyć częstotliwość taktowania - PIC16 można taktować do sygnałem o częstotliwości do 20 MHz, jednak również może to się okazać zbyt mało do poprawnego działania. Ponadto, zwiększenie częstotliwości taktowania powoduje zwiększenie poboru prądu, co nie jest korzystne dla urządzenia zasilanego bateryjnie.
Pozostało porzucenie idei wykorzystania przerwań i rozważenie odliczania opóźnień przez zliczanie w pętli cyklów rozkazowych. Dla 14 µs trzeba odliczyć 28 cykli przy fxtal=8 MHz. Takie rozwiązanie jest proste i skuteczne, ale dla precyzyjnego odmierzania czasu trzeba procedurę napisać w asemblerze. Już przystąpiłem do realizacji tego pomysłu, kiedy przyszedł mi do głowy inny pomysł.
Microchip ma w swojej ofercie bardzo dobrze wyposażone w układy peryferyjne mikrokontrolery PIC16F. Do sprzętowego generowania fali prostokątnej o programowanej częstotliwości można wykorzystać wyjście PWM. W mikrokontrolerach PIC16F sygnał PWM jest generowany w rozbudowanym module sprzętowym CCP (Capture/Compare PWM). Schemat blokowy modułu zaprogramowanego do pracy jako generator PWM pokazano na rysunku 1.
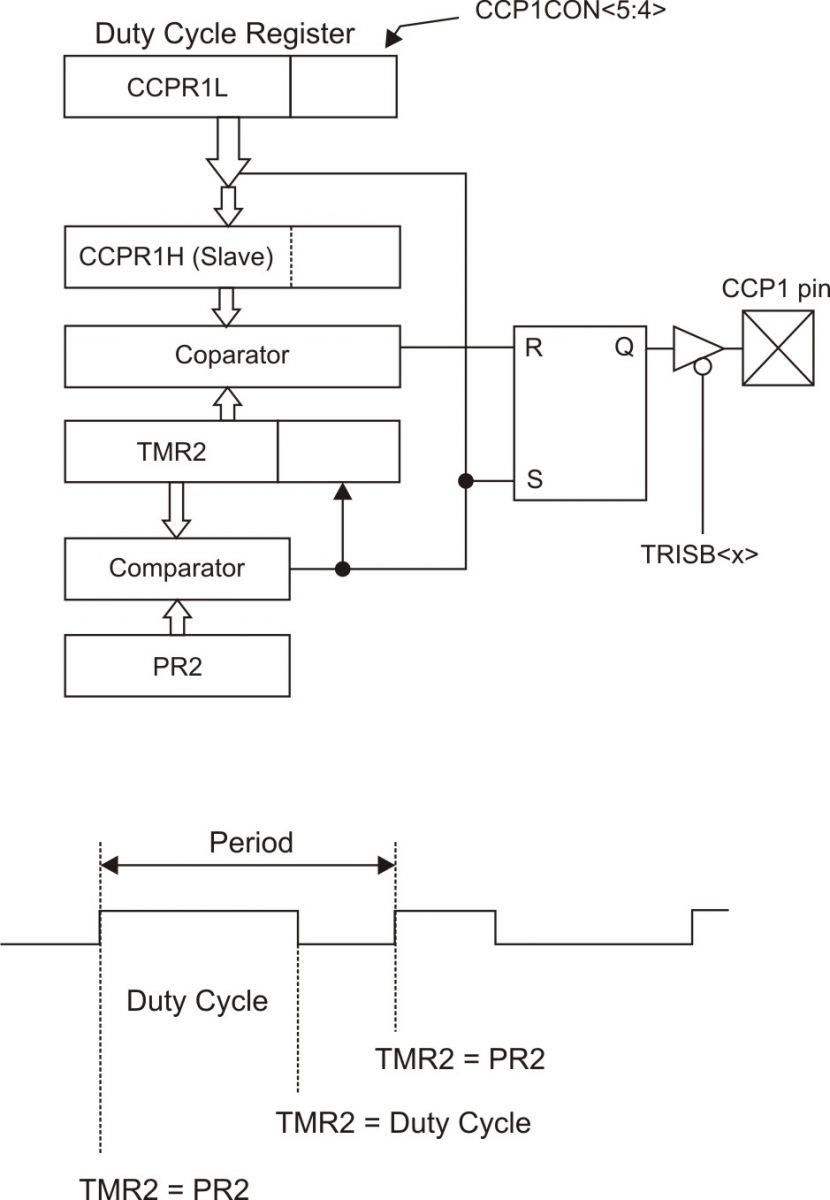
Rysunek 1. Schemat blokowy modułu PWM i sygnał wyjściowy

Dla 36 kHz PWM Period=28 µs, a dla Fosc=8 MHz 4×Tosc=0,5 µs. Do PR2 trzeba wpisać 28 µs /0,5 µs - 1=55, przy założeniu, że preskaler jest wyłączony (równy 1). W ten sposób ustalany jest okres przebiegu PWM. W następnym kroku trzeba ustalić współczynnik wypełnienia przebiegu na 50%. Wartość tego współczynnika programuje się z rozdzielczością 10 bitów, zapisując 8-bitowy rejestr CCPR1L (8 młodszych bitów) i 2 bity <5:4> rejestru CCP1CON według zależności:
![]() ,
,
w której PWM Duty Cycle to czas trwania stanu wysokiego. Jeżeli preskaler będzie wyłączony, to to otrzymamy
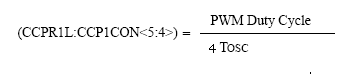
Jeżeli okres PWM trwa 28 µs, to dla wypełnienia 50% PWM Duty Cycle będzie trwał 14 µs. W takim wypadku wartość wpisywana do (CCPR1L:CCP1CON<5:4>) będzie równa 14 µs/0,5 µs =28. Tak skonfigurowany moduł generuje przebieg prostokątny o częstotliwości 36 kHz i wypełnieniu 50% sprzętowo i nie zajmuje czasu mikrokontrolera.
Do wykonania pilota wybrałem tani i dostępny mikrokontroler PIC16F628A. Ma wszystko co potrzeba: moduł CCP, i niewielką obudowę z 18 wyprowadzeniami. Schemat pilota pokazano na rysunku 2.
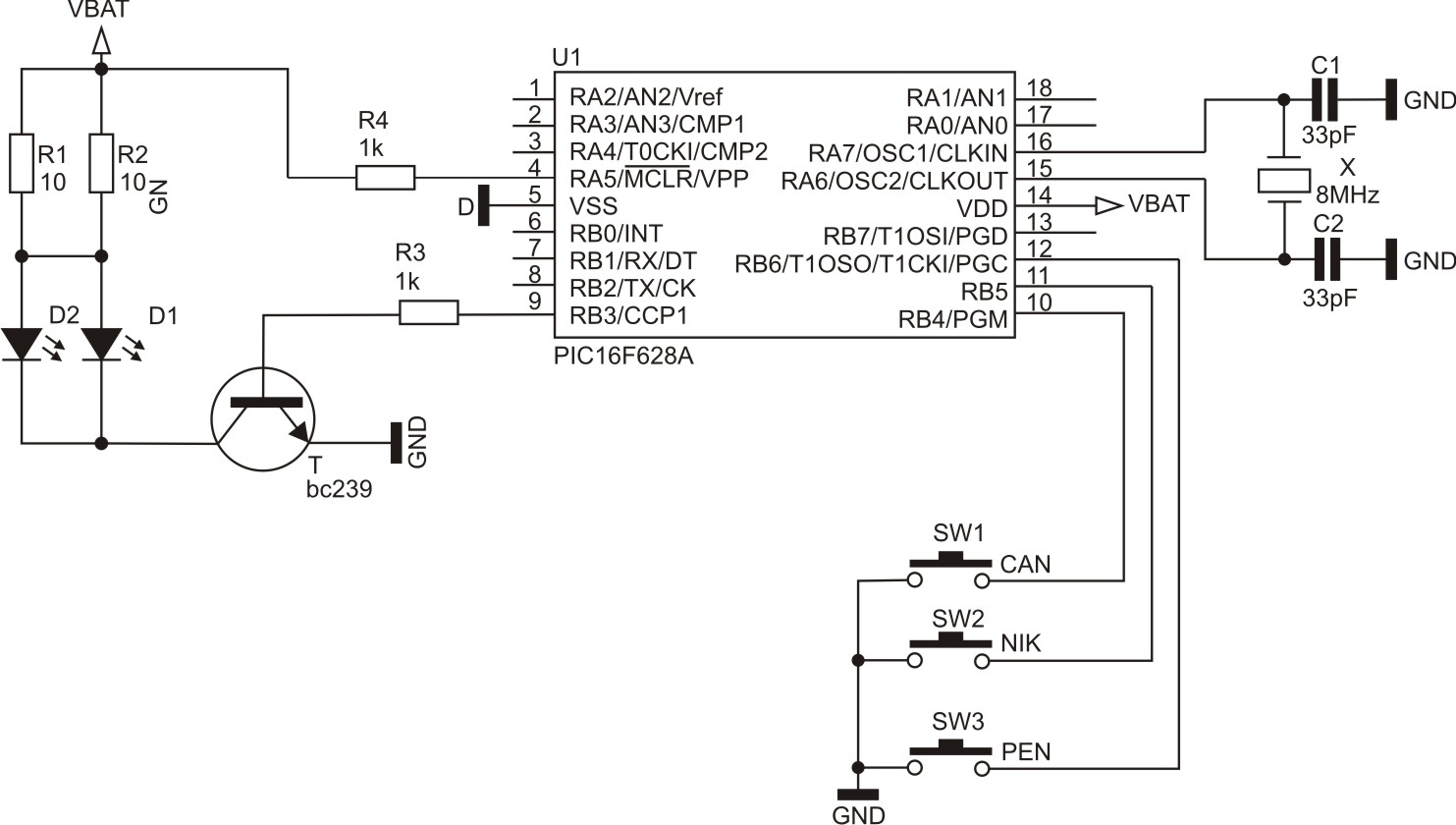
Rysunek 2. Schemat elektryczny pilota (kliknij aby powiększyć)
„Rysowanie” programu
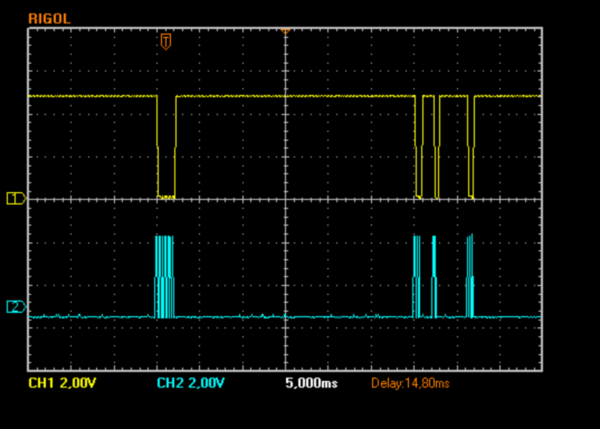
Oscylogram komendy zwolnienia migawki aparatu Pentax pokazano na rysunku 3. Komenda rozpoczyna się od stanu niskiego trwającego 13,2 milisekundy. Potem jest stan wysoki trwający 2,9 ms i 7 cykli składających się ze stanu niskiego trwającego 1 ms i wysokiego trwającego 900 µs.
Żeby ułatwić sobie pracę podzieliłem zadania na funkcjonalne fragmenty. W języku C fragmenty realizujące poszczególne zadania są umieszczane w procedurach wywoływanych z programu głównego. Większe zadania można też umieścić w oddzielnych plikach łączonych po kompilacji przez linker. We Flowcode odpowiednikami funkcji są tak zwane makra. Makro to fragment programu narysowany na oddzielnej planszy. Może ono mieć argumenty wejściowe (więcej niż jeden) i może zwracać zmienne. Oprócz makr programowych w pakiet zostały wbudowane wykonane przez producenta gotowe makra komponentów, pozwalające programować układy peryferyjne bez konieczności żmudnego „grzebania” w rejestrach. Będziemy również korzystać z takich makr przy programowaniu modułu PWM i licznika TMR0.
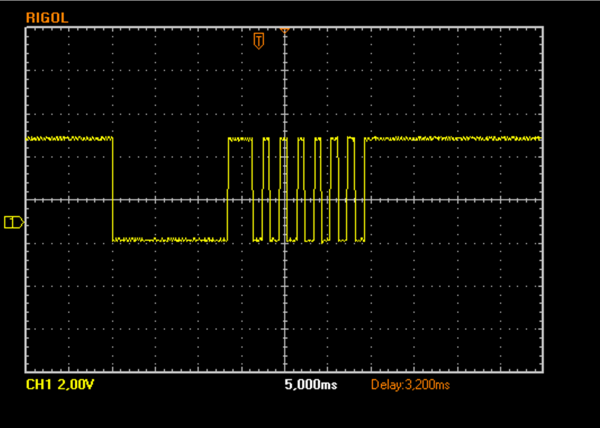
Rysunek 3. Oscylogram komendy zwalniania migawki Pentax
Jeżeli spojrzymy na oscylogram na rysunku 3, to widać, że konieczne będzie odliczanie opóźnień z rozdzielczością 100 µs. FlowCode ma wbudowaną funkcję odliczania opóźnień z rozdzielczością 1 ms, jednak jest to zbyt mało dla naszych potrzeb. Do odliczania opóźnień można wykorzystać na przykład licznik Timer0 zgłaszający przerwania co 100 µs.
Licznik Timer0 będzie zliczać impulsy o częstotliwości Fosc/4. Żeby przepełniał się co 100 µs, to musi zliczyć 200 impulsów o okresie 0,5 µs, bo tyle trwa jeden okres przebiegu o częstotliwości 2 MHz (8 MHz/4). FlowCode ma możliwość obsługi przerwań i w oparciu o przerwanie od przepełnienia TMT0 zostanie zbudowane makro odliczające opóźnienie.
Obsługę przerwania rozpoczniemy od jego odblokowania. Na schemacie stawiamy ikonę INT i z jej menu (otwieranego po kliknięciu prawym klawiszem) wybieramy zakładkę Properties (rysunek 4). Konfiguracja polega na wybraniu odblokowania (Enable interrupt), wybraniu rodzaju przerwania (TMR0 Overflow) i skojarzeniu go z makrem wykonywanym w momencie wywołanie przerwania. Cała operacja trwa kilka sekund. Jeżeli naciśniemy przycisk OK&Edit Macro, to program otworzy planszę nowego makra o nazwie int_tmr0, w którym będzie można narysować obsługę przerwania.
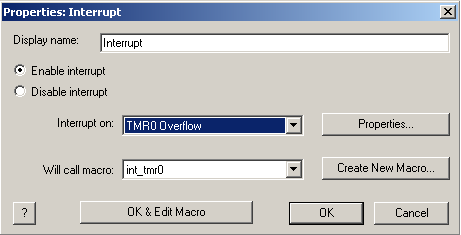
Rysunek 4. Odblokowanie i konfiguracja przerwania od przepełnienia TMR0
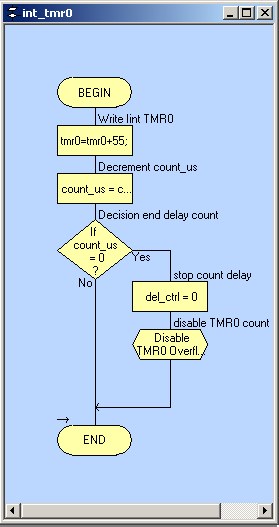
Rysunek 5. Makro obsługi przerwania od Timer0
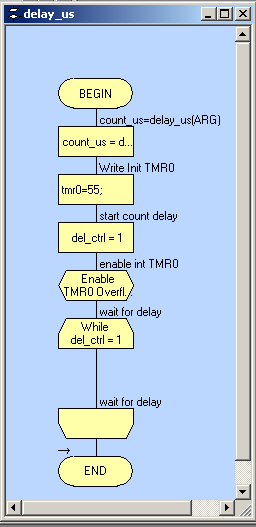
Rysunek 6. Makro funkcji odliczania opóźnień
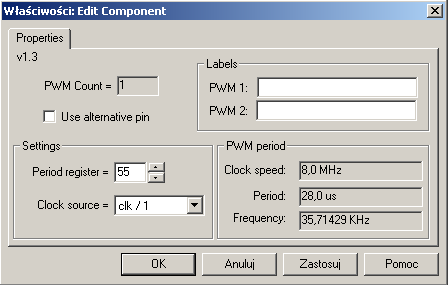
Rysunek 7. Okno właściwości komponentu PWM
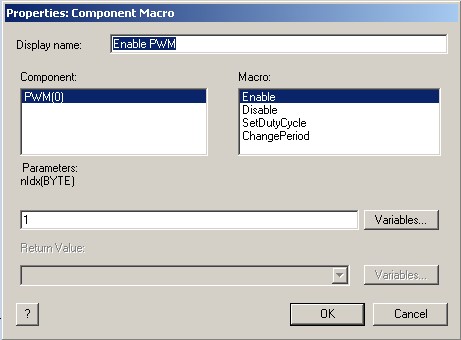
Rysunek 8. Okno właściwości komponentu PWM.
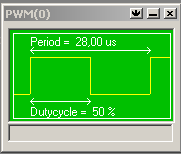
Rysunek 9. Okno zaprogramowanego komponentu PWM.
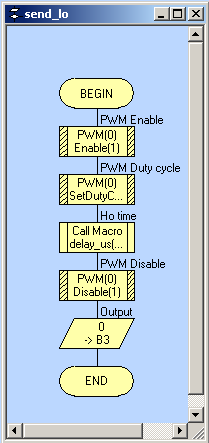
Rysunek 10. Makro wysyłania zera
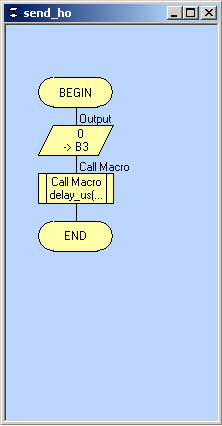
Rysunek 11. Makro wysyłania jedynki
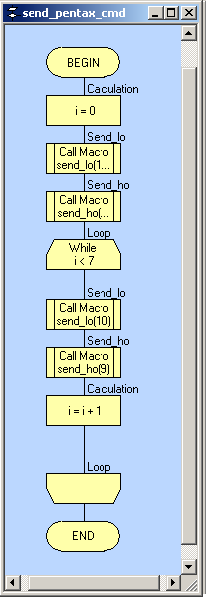
Rysunek 12. Funkcja wysyłania komendy
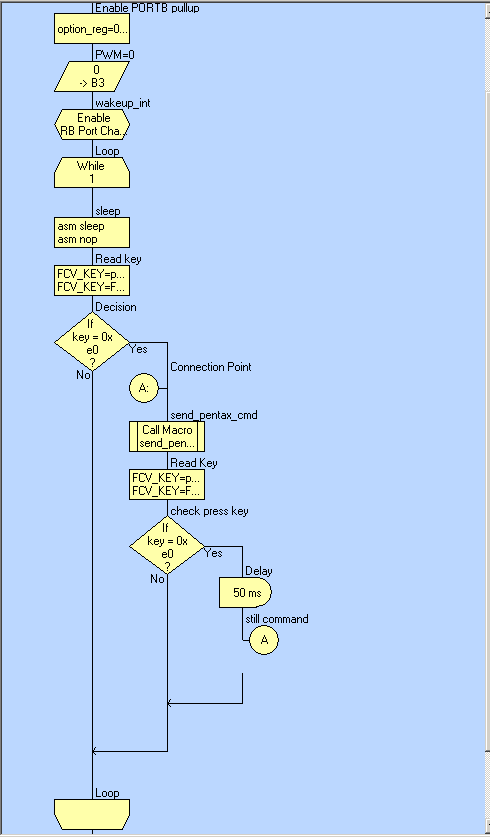
W mikrokontrolerach PIC16 tryb oszczędzania energii jest wprowadzany rozkazem sleep. Układ można wybudzić ze stanu uśpienia przez sprzętowe zerowanie (stan wysoki na MCLR), lub przez przerwania: zewnętrzne INT, od zmiany stanów na wejściach portu PORTB i od układów peryferyjnych odblokowywanych bitem PEIE. W naszym przypadku idealnym będzie przerwanie od zmian na liniach portu PORTB. Żeby było to możliwe trzeba odblokować przerwanie i w procedurze obsługi odczytać stan linii portów PORTB. Odblokowanie przerwania i tworzenie makra obsługi przerwania robi się tak samo, jak w przypadku opisywanego już przerwania od przepełnienia licznika TMR0. Na rysunku 13 pokazano pętlę główną programu wysyłającego komendę zwolnienia migawki Pentax. Przed jej wywołaniem odblokowane jest przerwanie od zmian na liniach PORTB oraz wymuszany jest stan niski na linii RB3 (wyjście PWM). Pozostawienie tej linii jako wejściowej powoduje, że układ pobiera ok. 30 mA prądu, bo tranzystor T1 przechodzi w stan pracy liniowej, a powinien być odcięty. Przez diody D1 i D2 płynie prąd do czasu naciśnięcia klawisza i zainicjowania modułu PWM , który w stanie nieaktywnym ustawia RB3 w stan niski.
Konfiguracja PWM i przerwania od Timer0 jest wykonywana przez makra programowe. Pierwszą instrukcją pętli jest rozkaz sleep. Jest on umieszczany pod symbolem ikony wprowadzania kodu C, pod którą można również wprowadzić polecenia zapisane w asemblerze: asm sleep. Po wykonaniu rozkazu sleep mikrokontroler jest usypiany i zmniejsza pobór prądu. Naciśnięcie przycisku podłączonego do linii PORTB powoduje zgłoszenie przerwania i wybudzenie mikrokontrolera. Jeżeli zostanie zidentyfikowane naciśnięcie przycisku podłączonego do RB6, to wysyłana jest komenda wyzwolenia migawki. Jeżeli po wysłaniu komendy klawisz jest nadal wciśnięty, to po odczekaniu opóźnienia wysyłane są cyklicznie komendy aż do stwierdzenia puszczenia klawisza. Mikrokontroler ponownie wchodzi w stan uśpienia i czeka na kolejne przerwanie.
Rysunek 13. Pętla główna programu
Budowa układu
Modelowy pilot został wykonany na kawału płytki uniwersalnej. Mała liczba elementów i połączeń powoduje, że taki montaż jest prosty i szybki. Uruchomienie pilota nie powinno nastręczać większych problemów. Po włożeniu w podstawkę lub przylutowaniu zaprogramowanego mikrokontrolera trzeba włączyć zasilanie. W trakcie testów układ był zasilany z trzech akumulatorków AAA połączonych szeregowo. Daje to napięcie zasilania ok. 3,5…3,8 V. Prąd pobierany z baterii, kiedy przyciski pilota nie są naciskane, nie powinien przekraczać 50...60 µA. W czasie, kiedy pilot wysyła zmodulowany sygnał komendy, pobór prądu wzrasta do ok. 11 mA.
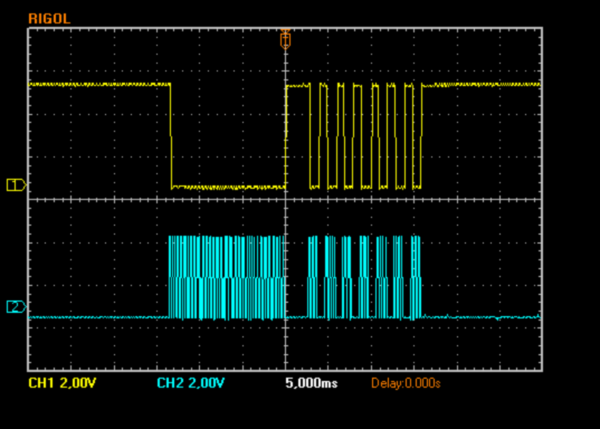
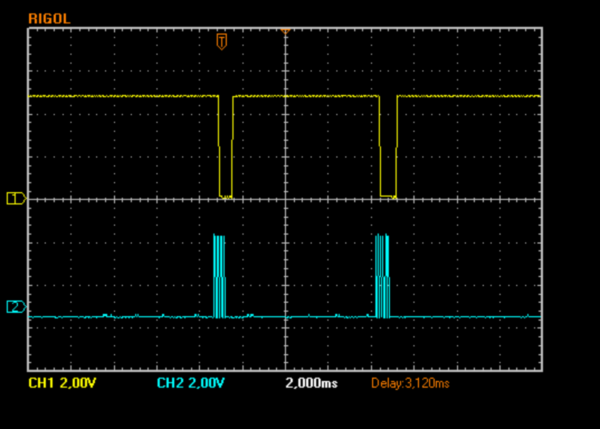
Rysunek 14. Oscylogramy odbieranej i nadawanej komendy do aparatu Pentax.
Aparaty firmy Pentax, mimo że cieszą się uznaniem, nie są najbardziej popularne na rynku. Częściej spotykane są dwie inne marki: Canon i Nikon. Skoro pilot wysyła komendę do Pentaxa, to nic nie stoi na przeszkodzie, żeby wysyłać komendy do innych aparatów. W trakcie projektowania układu przewidziano trzy przyciski do wysyłania trzech różnych komend. Każdy z przycisków miał być dedykowany dla komend różnych producentów aparatów. Na oscylogramie na rysunku 15 pokazano komendę dla aparatu Nikon. Rozpoczyna ją stan niski trwający ok. 2 ms. Potem jest poziom wysoki trwający 28 ms; niski 500 µs; wysoki 1,5 ms; niski 500 µs; wysoki 3,5 ms i sekwencja kończy się stanem niskim trwającym 500 µs. Narysowanie tak wykonywanej komendy, kiedy już mamy mechanizmy odliczania opóźnień i generowania nośnej, nie sprawi żadnego problemu. Przykład realizacji przedstawiono na rysunku 16. Podobnie jest z komendą dla aparatu Canon. Jej oscylogram przedstawiono na rysunku 17, a przykład realizacji na rysunku 18.
Rysunek 15. Oscylogram komendy dla aparatu Nikon
Rysunek 16. makro komendy aparatu Nikon
.png)
Rysunek 17. Oscylogram komendy aparatu Canon
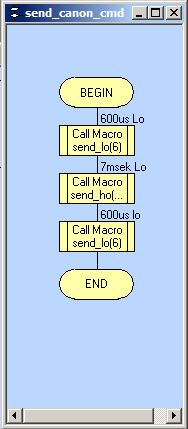
Rysunek 18. Makro komendy aparatu Canon.
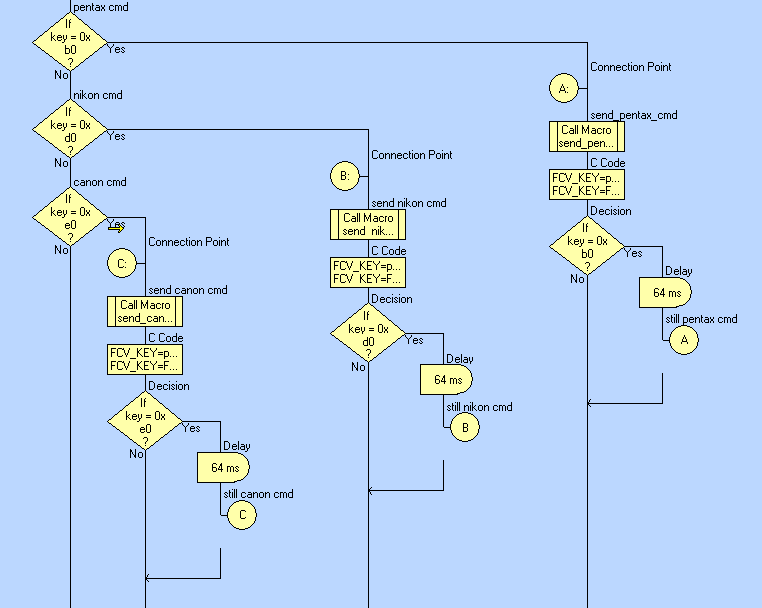
Rysunek 19. Kompletna pętla główna dla trzech aparatów (kliknij aby powiększyć)
Tomasz Jabłoński
tomasz.jablonski@easy-soft.net.pl
Wykaz elementów:
R1, R2: 10Ω/0,25W, SMD 1206
R3, R4: 1 kΩ, SMD 1206
C1, C2: 33 pF
U1: PIC16F628A I/P zaprogramowany
D1,D2: Diody LED IR
T: BC239
X – rezonator kwarcowy 8 MHz
Mikroprzyciski 3 szt.
Pojemnik na baterie

| Załącznik | Wielkość |
|---|---|
| Wzór płytki i plik dla procesora | 23.55 KB |


Dodaj nowy komentarz